

Hey there, Trail Tech Builder,
You know, designing a robot that glides smoothly across a hardwood floor is one thing. But getting that same robot to survive a backyard full of gravel, roots, and slope? That’s where true skill begins. This guide isn’t just a technical how-to. It’s a conversation, a roadmap, and a problem-solving journal for anyone who’s ever dreamed of building a bot that doesn’t freak out when the ground gets messy.
Let’s admit something early—most guides online only cover the basics. A frame, some wheels, a few sensors. Done. However, you are reading this and that means you are looking beyond that. You want your robot to think, react and exist under unpredictable conditions. Maybe your terrain is your farm. Maybe it’s a school robotics challenge. Maybe it’s a hiking trail where GPS is patchy and traction is a myth. Wherever it is, you want your robot to get through it.
This is part one of a two-part deep-dive where we’re going to break it all down. The surfaces, the senses, the makes, the victories,–and the defeat of them.
Key Takeaways
- Uneven terrain exposes flaws in design quicker than any flat surface.
- Choosing the right movement system starts with understanding the terrain.
- Sensors give your robot the ability to adapt—not just react.
- Suspension is more important than most first-time builders realize.
- Success comes by solving one surface at a time—not all at once.
What Makes Uneven Terrain So Difficult?
You’d think the robot only needs stronger motors or larger wheels. That’s what most people assume. But it goes deeper. Uneven terrain introduces variables—surfaces that sink, tilt, or push back. What works fine on a living room rug can quickly crumble when the robot’s left wheel drops into a hole or when it climbs an angled path.
The way your robot’s body responds to those surface shifts determines whether it survives or stalls. Weight balance changes mid-movement. One joint underperforms. The center of mass shifts. Most robots aren’t built for this because the design doesn’t anticipate the ground fighting back.
And let’s not forget terrain isn’t always visible. Tall grass hides dips. Sand looks solid but eats up torque. Rain turns a path into glue. You’re not just designing a machine; you’re designing for unpredictability.
Setting Clear Goals Before You Build
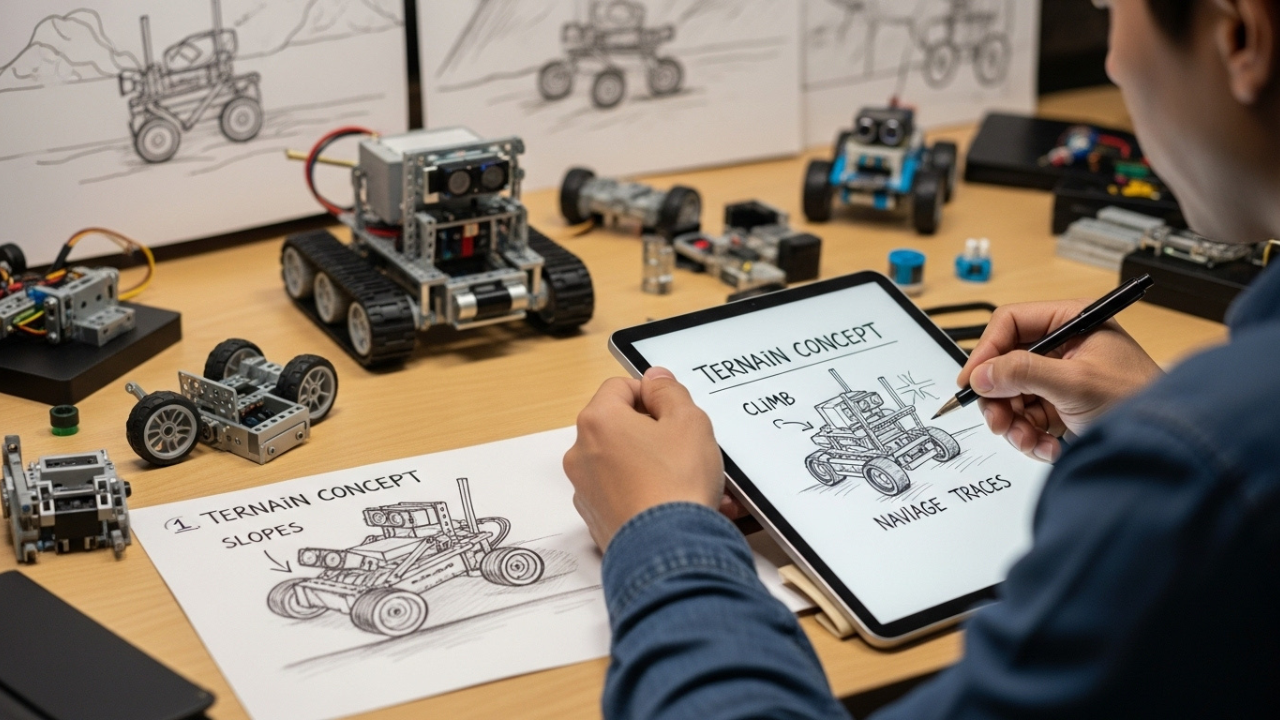
Every builder wants their robot to do “a bit of everything,” but that mindset creates bloated, confused machines. Here’s something that sounds harsh but helps: the more focused your robot is, the better it handles terrain. Before anything else, decide what matters most.
Do you want it to climb slopes with gear on its back? Should it turn tightly in narrow spaces? Are you hoping to monitor soil or pick up trash in a park? Your design must match that task. Terrain robots need purpose-driven builds. Generalists fail fast when the surface changes under their wheels.
So take a notebook or digital sketchpad. Write the one thing your bot must do well. Not three things—just one. This keeps the next choices—locomotion, chassis, sensors—from spiraling into chaos.
What’s the Ground Telling You?
Think Like the Terrain
If you want your robot to succeed, stop thinking like a builder for a moment and start thinking like the ground. It may sound odd, but it’s critical. The terrain isn’t just the path your robot travels—it’s an active opponent at every step.
Turn Sensation Into Data
Start observing the space. Walk it barefoot if possible. What do you feel? Loose patches? Slipping? Bounce? Every sensation is a piece of data. It tells you where your robot might trip, sink, tilt, or stall.
Understand Micro-Terrain
Even a simple backyard holds complexity: compact dirt, soft grass, gravel, brick, and maybe some mud near a tap. One wheel might roll smoothly while the other bounces or drags. Multiply that over 10 meters, and you’re looking at the true challenge of design—not just building a robot, but building one that listens to the land.
Locomotion Isn’t Just About Wheels
So let’s talk movement. One wants to mechanically arrive to the solution of wheels but this is not always the most appropriate decision. On even surfaces wheels are terrific. But as soon as the ground shifts, their limitations show. They can’t adapt to big rocks or sudden drops.
Tracks—like those on a tank—spread weight across a larger area. That helps on soft ground like sand or snow. But they have poor turning efficiency and burn power quickly. Legs offer the most flexibility. They step, lift, and adapt. And they are difficult to construct and practically impossible to manage if one lacks quality programming skills.
No one choice deserves to be called (perfect), but there is always the best-fit. In case you have unpredictable and mixed terrain, you might want a hybrid design that offers a combination of speed and adaptability to you in the form of wheels that have assistive lifting legs.
There’s no perfect choice, but there’s always a best-fit. If your terrain is unpredictable and mixed, a hybrid design—wheels with assistive lifting legs—could give you a balance of speed and adaptability. If the terrain is more consistent but soft, tracks might be all you need.
Getting Suspension Right
Most beginners skip suspension completely. Big mistake. Suspension makes the main body of the robot leveled even when the wheels are bumped. In its absence a single shock may turn off your electronics, bend or even destroy a servo, or simply flip the entire frame aside.
There are DIY-friendly ways to build basic suspension. Rubber bands, springs, even flexible plastic layers can absorb motion. More advanced bots use rocker-bogie systems like NASA’s Mars rovers. These setups allow one side to lift high while the other stays stable.
Try building a cardboard mockup. Push it over a broomstick. Watch where it flexes and fails. That’s where your suspension is needed.
Seeing the World: Sensors and Smart Feedback
Awareness Begins with Sensing
Let’s be honest—your robot can’t adapt to a messy path unless it knows the path is messy. That’s the job of sensors. The best part? You don’t need a huge budget to get started.
Detect distance using ultrasonic. Use accelerometers and gyroscopes in detecting tilts and shifts. Use infrared to follow lines or detect heat. Combine these, and suddenly your robot isn’t just moving—it’s thinking.
Placement Is Intelligence
Where you mount sensors matters just as much as what sensors you use. Don’t just strap them on the underside. Give your robot the ability to see ahead, not just react to collisions. If it only responds after hitting something, it’s not intelligent—it’s just late.
Start Simple, Then Evolve
Worried the coding will be too hard? Don’t be. Begin with basic logic:
“If tilt > 30°, slow down.”
That’s a smart move already. As you gather data and experience, layer in more logic. Intelligent sensing creates intelligent robots -and intelligent robots live to take surprises.
Small Wins Lead to Big Gains
You cannot overcome all challenges on terrain at one go. Pick one surface type and master it. Build a test robot that only handles loose soil. Learn from every trip and tip. Once you have stability there, modify it to handle inclines. Add one improvement at a time.
The real test isn’t how well your robot moves in your living room. It’s how well it survives when the ground gets mean.
Where Control Meets Creativity

If you’re here, it means your robot is no longer just a body on wheels—it’s beginning to look like something that can handle a challenge. In this part, we’re shifting the spotlight from structure to behavior. Because a well-built bot with poor control is just a fancy brick.
You’re going to learn how to make your robot think, adjust, and act smarter when the terrain throws it a curve. Whether it’s rocks, slopes, or an unexpected puddle, the robot should respond with purpose—not panic.
Writing the Brain: Logic That Adjusts in Real-Time
This doesn’t need to be a university-level AI project. Your robot’s brain can start with simple rules. If the slope increases, slow the motors. If one side lifts too high, shift weight or steer differently.
Control logic should act like reflexes. Fast, simple, clear. Start small. For example, combine tilt sensors with code that adjusts wheel speed. When the robot detects that it is at high angle, it slows down or reduces the turning radius.
Testing Isn’t the Last Step—It’s the Lifeline
Many builders test at the end. That’s a huge mistake. Terrain changes demand regular testing throughout the build. Make a basic track with common challenges: gravel, a small slope, loose soil. Roll your bot over it every time you change a part or upload new code.
Keep notes. Better yet, film the runs. Watch them later. You’ll catch balance issues, wheel slips, or code misfires you didn’t see in real-time. Every test tells you what the robot can’t handle—yet.
Here’s something useful to try:
| Terrain Type | Symptom Observed | Adjustment Suggested |
|---|---|---|
| Loose Soil | Wheels spin, no grip | Add treads or widen tires |
| Gravel | Jerky movement | Lower speed, improve balance |
| Slope > 15% | Tipping backwards | Adjust center of mass |
This isn’t just debugging. This is dialogue—between you and your machine.
The Power Problem: Balancing Energy and Endurance
Terrain Eats Power
Uneven ground doesn’t just challenge your robot’s traction—it saps its energy. Motors strain harder to climb or stabilize. Sensors trigger more frequently to adapt. Control loops speed up to maintain balance. The result? Battery drain that outpaces your expectations.
Battery Life Is Survival
In the performance-driven robotics world battery life is more than a spec, it is an operational requirement. Always select batteries dependent on the worst environment that your robot is subjected to. If it has to climb a slope while hauling weight, test it under exactly those conditions. Don’t assume. Simulate the stress.
Build Smarter: Design for Rest
Endurance isn’t just about more power—it’s about smarter behavior. The best designs include rest. Add pause commands when sensors detect overheating or dangerous tilt. Let the robot take a breath before failure forces a shutdown. Recovery time can mean mission success.
Thinking in Loops: Feedback and Correction
A robot that corrects itself is more valuable than one that avoids mistakes. Every terrain robot needs a feedback loop—a cycle where it checks its sensors, adjusts, and repeats.
Imagine this:
- Sensor reads 40° tilt
- Robot slows motor A
- Waits one second
- Reads again
- If stable, resume speed
This feedback loop prevents overcorrection. Instead of reacting wildly, the robot moves with reason. That’s what makes it feel “smart.”
Real Robots, Real Terrain

Let’s bring this down to ground level. Rescue robots in disaster zones use legged designs with cameras. Agricultural bots run across uneven fields using thick tires and smart GPS. Space robots like Curiosity move slow but steady, adjusting one wheel at a time.
What do they all share? They were tested in rough terrain long before they faced the real mission. You’re doing the same thing. The scale is smaller, but the thinking is big.
A Project You Can Start This Week
Here’s a simple challenge: Build a two-wheeled rover that can cross a 3-meter stretch of gravel, a 10° incline, and one soft patch (like a sandbag or loose dirt).
Use cardboard, a cheap Arduino, and basic gear motors. Program it to stop when tilted more than 25°. Test. Tweak. Improve.
You are not trying to make the brain perfect you are creating a learning brain.
Wrapping Up: The Road Isn’t Smooth—and That’s the Point
Robots built for flat surfaces live short lives. Terrain robots live through struggle. Every bump teaches. Every tilt adds wisdom. You don’t need to solve robotics to build a great machine—you need to care enough to test, fix, and test again.
So keep building. Keep pushing. Your next robot won’t just roll. It will conquer.
