

One of the more captivating fields of robotics nowadays is known as swarm robotics. It takes its cues out of the finest examples of nature when it comes to looking at ants that seek out food, birds that fly in flocks, or bees that gather information without talking.
As opposed to wings and pheromones; swarm robots incorporate sensors, code, and algorithms. In straightforward terms language, swarm robotics boils down to the employment of substantial amounts of basic robots donating cooperation and accomplishment of a common objective.
Robots individually may be simple in nature but when organized effectively are powerful- able to cover distances, able to act in response to change and to take on tasks that would be too much for a stand-alone machine. Swarm robotics may not be a futuristic study framework anymore as additional industries have been seeking efficiency and safety through automation. It is entering into applications.
And synchronicity or how these robots move, think, and respond as a collective is the buzz of this revolution. Over 2 parts of the article, we are going to consider the evolution of swarm coordination and identify the trends that are transforming the sphere, paying attention to the possibilities that beginners have to get involved in the sphere which undergoes rapid development.
Key Takeaways
-
Swarm coordination is beginning to transition out of the laboratory and into agriculture, disaster zones, and logistics.
-
Swarms are more scalable and fault tolerant because of trends such as decentralized control and probabilistic behavior.
-
The communication is becoming local, signals based on events, rather than commands on the entire network.
-
Robots are learning there are systems to adapt and coordinate without the hard coded rules.
-
Today you can begin to play with swarm behavior with simulations, Arduino-based bots and open source libraries.
What Is Swarm Coordination — and Why It Matters
The common sense of coordination in swarm robotics applies by asking the question of how dozens (or hundreds) of robots can know what to do, where to go and how to avoid one another? In the centralized architecture, all the robots are simply instructed by a single controller.
However this approach fails as the swarm becomes larger. A single failure may bring the entire system to fall, it takes a long time to communicate and complexity is magnified.
It is why the new trend in a swarm coordination is in decentralized control each robot now has a capacity to make its own decisions based on its own sensors and surroundings and a limited number of messages to be exchanged with the neighboring units. Such robots do not require to see the whole picture.
All they are expected to know is only enough to act the way that satisfies the group pattern. It is analogous to the school of fish. Every fish reacts to his companions and neighbors and the whole school swims like one individual.
The Rise of Decentralized Control Systems

Among the greatest changes in recent years is the abandonment of a top-down control. More swarms are also working with local control without the need of central server or controller. It implies that both robots possess some simple rules and perceive the surrounding space and make their decisions depending on the perception.
This increases the level of fault-tolerance in the system. When one of the robots breaks down, the other robots continue working. There is no brain to lose. It also minimizes the communication delays and it makes the swarm more responsive to environmental changes.
As an illustration, each robot in a swarm of cleaning robots acting within a large building could control its battery life, map around a few meters worth of environment, and detect other robots by observing distance sensors. The group can also efficiently cover the area without discussing to all the robots simultaneously.
Decentralized systems also allow for scalability. You can add or remove robots from the swarm without having to reprogram the whole system. The rules remain the same — it’s just a bigger or smaller group now.
Probabilistic and Bio-Inspired Coordination Methods
With swarm robotics still being refined, the transition toward probabilistic behavior has become one of the most influential ones, as this approach introduces flexibility, kinds of diversity, and resilience to the decisions of swarms.
Adding Randomness to Improve Adaptability
In the classical robot cases, Behavior is often hard coded: when condition A occurs execute action B. However, that rigidity is restricting in swarm coordination. When all the robots react identically to any scenario, these robots will be prone to clumping, stalling, or creating bottlenecks in restricted spaces.
With probabilistic methods, robots don’t follow one fixed response. They rather make decisions regarding several alternatives with provided chances. An example is when a robot senses some object and there are chances that it will go left 70 percent of cases and right 30 percent of cases. This slight randomness avoids bottlenecks and makes the swarm more dynamic, especially in exploration tasks where space and pathways are constantly changing.
Learning from Nature’s Most Efficient Swarms
Much of this thinking comes from the way animals behave in groups. In nature, randomness isn’t a design flaw — it’s a survival tactic. Ants, for example, don’t all take the same path to food. Others just may either take a longer path or appear to behave inefficiently, and yet such behavior will allow the entire group to find better solutions.
Birds fly in graceful groups not because there is a bird that controls the rest, but because every bird follows the actions of the others. This type of emergent behavior is also seen when fish swarm, bees swarm and when mammals herd, as well.
Turning Biology Into Programmable Behavior
Roboticists are now borrowing these patterns and building them into systems. A robot may “forage” like an ant, exploring widely but returning to a base when it finds a target. Another might “signal” like a bee, sharing its findings with others through simple pulses or flashes. A third could “flock” like a bird, using local distance and motion sensing to align with its nearest neighbors.
These behaviors aren’t copied directly from biology — they’re inspired by it. The goal isn’t to make a robot act like an animal, but to create simple local rules that, when used by the whole group, lead to intelligent swarm coordination. It’s not magic — it’s math, pattern, and smart design.
In the end, probabilistic and bio-inspired coordination methods bring adaptability, fault tolerance, and scalability to swarms — the very qualities that allow them to operate in messy, unpredictable real-world environments.
Learning Coordination: The Role of AI and Reinforcement Learning
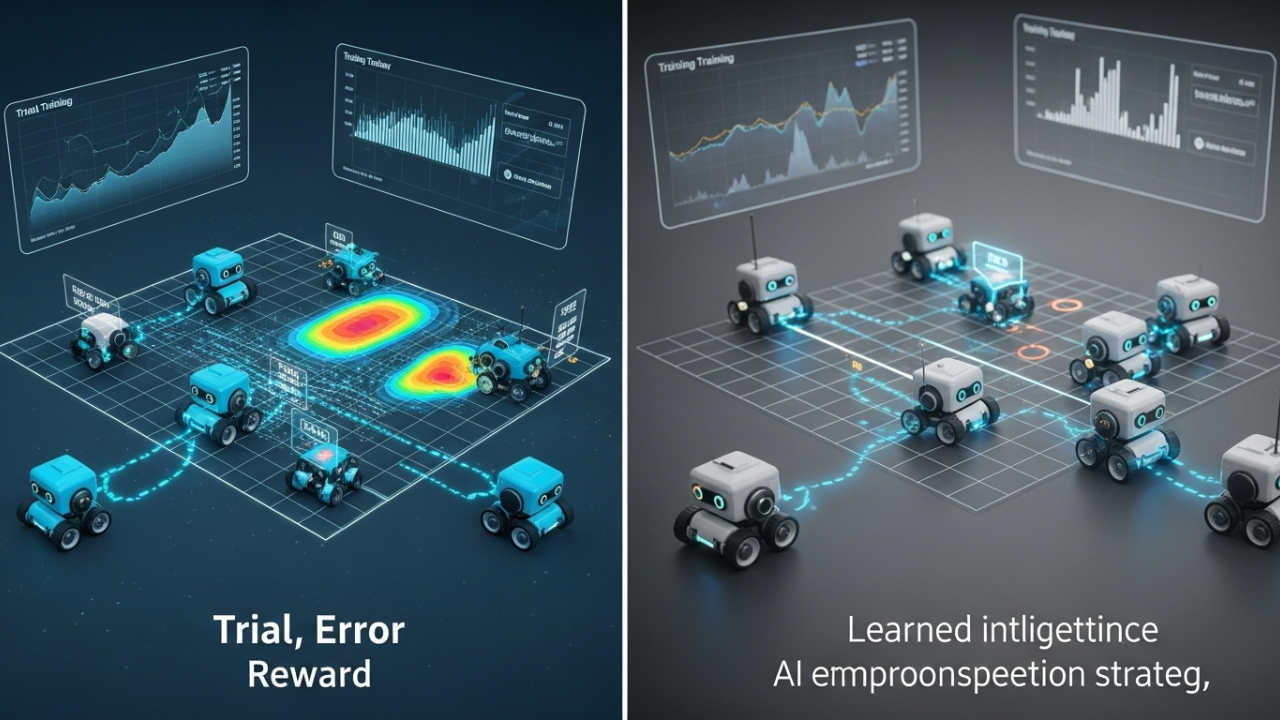
With the rise of machine learning, swarm coordination has entered a new phase. Instead of programming behaviors manually, developers are now training robots to coordinate through learning.
In this method, individual robots are put in simulation with rewards which are given to the robots to accomplish a goal- like covering an area, avoiding overlap or completing tasks within any time. The robots are put through repeated iterations during which they get to learn what behaviors are rewarded. These behaviors can then be transferred to real hardware.
Reinforcement learning in swarms allows robots to adapt to unexpected environments. They don’t just follow rules — they learn strategies. And because the learning happens in a digital space, developers can train swarms faster, cheaper, and with fewer risks.
This also opens the door to swarm memory. In the past, swarms acted without memory — each action was based only on the current situation. With learning, robots can now retain insights and apply them to new tasks or conditions.
Warm Robotics in Action: Where the Trends Are Landing
The true test of any robotics concept lies in application — and swarm robotics is beginning to prove itself in multiple domains. What was once just theory is now guiding robots through debris, into fields, and across factory floors.
Disaster Response and Search Missions
Swarm coordination can work at best in search and rescue. Eranquake, flood, and fire affected areas are usually too unsafe or unstable for human beings to venture in right away. Packs of robots have the ability to rapidly move the ground, surveying damage, and detecting risks, all the time without the necessity of a central command.
Each drone operates semi-independently but shares mapping data locally with nearby units. If one drops out, the rest keep working. This resilience, powered by local decision-making and decentralized navigation, marks a shift from traditional drone control methods.
Agriculture and Crop Monitoring
In agriculture, coordinating many small robots to scan fields, track plant health, or even perform micro-planting is becoming a more affordable alternative to large, expensive machines.
Swarm systems in this space often use zone-based coordination. Each robot takes responsibility for a small plot, but communicates with its neighbors to maintain coverage, avoid overlap, and flag areas that require human attention. These systems don’t rely on perfect GPS or internet — they rely on good cooperation.
Warehousing and Indoor Logistics
Robots are organized in flocks that help to manage the inventory and complete transport tasks in controlled indoor spaces, i.e., in warehouses and fulfilment centers. Rather than depending on a central system to tell every robot where to go, local pathfinding and obstacle awareness now allow for smoother traffic management.
Swarm coordination here focuses on conflict resolution — making sure two robots don’t try to use the same aisle or charging station at once. Smart sensors and real-time decisions have become the backbone of this kind of coordination, reducing the need for complex central systems.
Challenges That Swarms Still Face
Notwithstanding all these advances, coordination in swarm is not at all a cakewalk. Programmers are still struggling with a combination of hardware constraints, scaling, and the real world unpredictability.
Maintaining Structure Without Central Control
On the one hand, the decentralized systems are flexible; on the other hand, they may become unstable. Swarms in the absence of clear leadership can drift apart, congregate into the same space or not respond well to changing conditions which need rapid adjustments. Researchers are coming up with adaptive coordination rules to handle this, but it is still complicated to test beyond simulation.
Communication Delays and Interference
Even with minimalist signaling, communication remains a bottleneck — especially when operating in environments with poor reception or heavy interference. Some swarm designs are exploring delay-tolerant networks or fallback behaviors that allow temporary disconnection, but there’s still room for improvement.
Energy and Battery Management
As swarms become more mobile and long-running, power management becomes critical. If all units need to recharge at once, coordination breaks down. Some researchers are exploring swarm-level battery planning — even having some units act as mobile chargers. But most current systems still rely on human intervention at some point.
Ethical and Safety Considerations
Traditional vs. Emerging Coordination Methods
Here’s a simple comparison of older approaches versus newer trends in swarm coordination:
| Aspect | Traditional Coordination | Emerging Trend |
|---|---|---|
| Control Structure | Centralized (single controller) | Decentralized / distributed |
| Communication | Constant, full-swarm updates | Localized, event-based |
| Behavior Logic | Rule-based and rigid | Probabilistic, adaptive |
| Learning Approach | Manual programming | Reinforcement learning, simulation-based |
| Fault Tolerance | Single point of failure | Redundant and autonomous |
| Scalability | Limited by computation | More scalable with independent units |
This shift reflects a deeper philosophy: instead of controlling every move, developers now design systems that teach robots how to behave based on local input and shared goals.
Getting Started with Swarm Coordination – For Learners and Builders
You don’t need a research grant or corporate lab to start exploring swarm coordination. It is simpler to reach with cheap-to-use parts and free software.
Simulate Before You Build
Before wiring anything, use platforms like Tinkercad Circuits, Webots, or Gazebo to simulate multiple robots interacting. These tools let you test movement, coordination logic, and even failure scenarios in a virtual world.
You can program basic swarm behaviors like flocking, foraging, or line formation — then see how they play out at scale. You’ll quickly learn what works and what breaks down.
Use Modular, Inexpensive Hardware
Arduino boards, ESP32 modules, and Raspberry Pi Pico units are great entry points. With less than 30 dollars per unit, you may be able to construct mini robots that move, sense and react. Work on making two or even three of the bots communicate and only then continue.
Start with basic coordination behaviors:
-
Avoiding collisions
-
Spreading out to cover space
-
Reacting to shared signals like LEDs or beeps
Every new behavior you construct forms something new on top of the potential of your swarm.
Leverage Open-Source Frameworks
Swarm experiments can be based on such projects as ROS (Robot Operating System) or libraries as Kilombo (simulations in Kilobots). You can use these structures to make sure that you are not re-inventing the wheel–as you can work with the high-level of coordination logic, as opposed to the low-level code.
Looking Ahead: The Future of Swarm Coordination
The latest trends in swarm robotics coordination point to a future that’s more autonomous, adaptive, and useful. As AI becomes more embedded in everyday devices, swarms will become more than just groups of bots — they’ll become systems that learn, evolve, and support humans in ways we couldn’t manage alone.
Expect to see:
-
Cross-platform swarms — where drones, land robots, and underwater bots collaborate
-
Energy-sharing models — where stronger units support weaker ones
-
Swarm-specific programming languages — focused on behaviors and outcomes instead of instructions
-
Human-swarm interaction interfaces — where one operator can guide large swarms with simple gestures or commands
But perhaps the biggest shift will be one of mindset: from building smarter robots to building smarter groups.
