

Mobile robots are increasingly becoming a common presence as an everyday space, whether it is by moving themselves around in a warehouse or navigating streets and sidewalks or an intricate indoor landscape. The key to these systems is one question: how will a robot know where its location and surroundings are? Mapping is critical due to that challenge.
A robot that lacks a map is blind. It might have wheels, code, and something to accomplish yet unless it is able to view the world around it in real-time and know how/where to move safely, it will not get very far. There is one technology, which is particularly helpful in resolving this issue: LiDAR. Light Detection and Ranging, or LiDAR, as it is referred to in the short-form, enables mobile robots to view their environments by emitting laser pulse and recording reflections.
This produces very precise measuring of distance that can be compiled as an elaborate map. This guide will deconstruct the role of LiDAR in aiding mobile robots in the mapping process mapping, covering the simple structure of LiDAR to enhance the complexity of its role in navigation, localization, and task accomplishment.
Key Takeaways
-
Depending on the size, environment and budget of your robot the selection of the right LiDAR is necessary.
-
LiDAR-based mapping in real-time ensures efficient navigation that is safer and more accurate.
-
LiDAR can perform reliably as long as it is installed correctly and managed powerwise.
-
Integration of LiDAR with additional sensors increases mapping and localization.
-
The innovation in LiDAR, the sphere of increasing artificial intelligence and solid-state LiDAR is enabling robot navigation to become more sophisticated and inexpensive.
What Is LiDAR and How Does It Work?
The principle of LiDAR is quite straightforward. It emits small pulses of laser light, typically in the infrared, and then determines the time taken by these pulses to rocket into nearby surfaces and bounce back to the sensor. Since the speed of the light is a constant value, it can be translated into distance after measuring this time.
The sole process enables a LiDAR device to scan the surrounding area and it measures things, figures, walls, or any object within the epidermis that the laser beam reaches. Repeated thousands of times a second when rotating it causes a sweeping real-time map of the surroundings.
2D vs. 3D LiDAR
-
2D LiDAR is usually used to spin on a level plane and measures only one horizontal layer of the surrounding. It is faster, less expensive, and suitable when the application involving mobile robots is, say, ground-based and does not require anything more than detecting the walls, people, or obstacles on the flat surface.
-
3D LiDAR adds vertical scanning, producing full three-dimensional point clouds. These are more detailed and more costly as well as data intensive. They are applied in more sophisticated systems such as self-driving cars or terrain mapping by using drones.
Why Mobile Robots Need Reliable Mapping Systems
Any robot which navigates on room, particularly one that it has not seen before must construct and maintain a representation of its surroundings. LiDAR comes in handy there. Robots without sensors must only use pre determined pathways or wheel encoders to estimate location.
Slippery surfaces though are floors. Wheels are able to drift. There can be a movement of objects. This renders the dead reckoning as inaccurate, particularly in open or densely populated areas.
LiDAR enables bots to see the world in realtime, locate objects as they come and respond to changes as they happen. LiDAR can be used to map, and this enables robots to:
-
Know where they are relative to their surroundings
-
Build a layout of rooms, hallways, or outdoor areas
-
Detect moving objects or new obstacles
-
Choose paths that are efficient and safe
In short, LiDAR turns guesswork into vision.
How LiDAR Improves Mapping in Mobile Robots
LiDAR plays a direct role in every stage of mapping — from initial exploration to long-term localization. Here’s how it helps robots navigate more effectively.
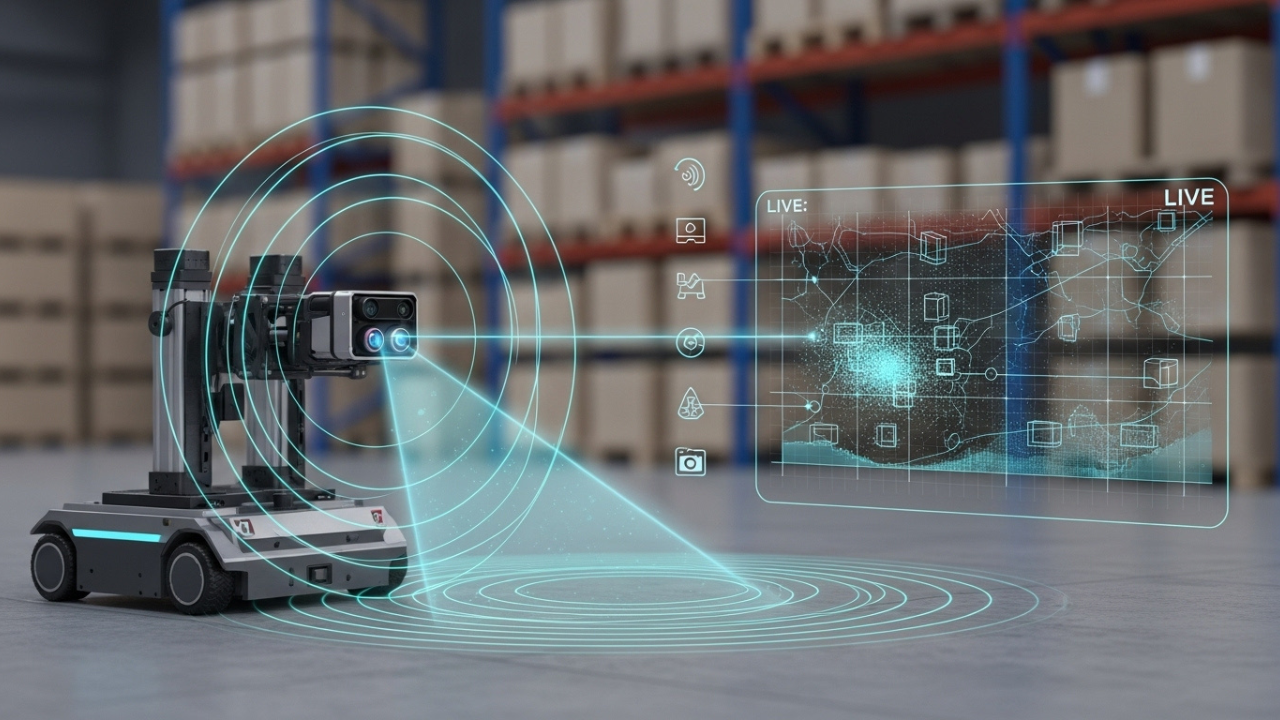
Real-Time Scanning of the Environment
A rotating LiDAR sensor can scan its surroundings many times per second. Each rotation produces a “slice” of the environment, like a 360° view at the robot’s height. These cuts are used to construct a virtual model of walls, edges, furniture and other obstructions.
This set of distance points gets a 2D map as the robot roves around and collects more data. This map can be real-time and the robot is able to identify new obstacles or changes and adjust the route.
Obstacle Detection and Avoidance
Building Maps with SLAM
LiDAR is also a key sensor in a popular robotics approach known as SLAM — Simultaneous Localization and Mapping. Such a method enables the robot to create a map of the environment, as well as remember its location within that map.
Unlike other M4 technologies such as GPS (which cannot work indoors), the SLAM systems rely on LiDAR, wheel encoders and other inertial sensors (where available) to estimate the position and in real-time update the map.
We will address SLAM much more later, but the point, at least in a nutshell, is this: SLAM uses LiDAR to provide it with the spatial information required to create correct maps in real-time.
How SLAM and LiDAR Work Together
SLAM is a core algorithm in mobile robotics. Imagine dropping a robot into an unfamiliar room with no floor plan. It must determine what the space is like and how it stands, in that space all at once.
LiDAR causes the robot to begin scanning its environment. It starts to pickup distances and forms. In its movement, the data is changing. Through the mathematical models, SLAM will compare the new reading to earlier readings, calculate the distance covered by the robot and the map will be updated.
The LiDAR/SLAM combination makes the robot able to:
-
Find one way to go without previous acquaintance to the location
- Back to the same location without any GPS
-
Correct its course if wheel slippage or bumps throw it off
-
Map large indoor environments like buildings, warehouses, or tunnels
Some of the most commonly used SLAM algorithms compatible with LiDAR include:
-
GMapping – popular with 2D LiDAR and mobile platforms using ROS
-
Cartographer – developed by Google, supports 2D and 3D mapping
-
Hector SLAM – designed for systems with poor odometry
Real-Life Applications of LiDAR Mapping in Mobile Robots
LiDAR-enabled mapping isn’t just theory. It’s being used right now in robots across multiple industries. The combination of spatial awareness and dynamic mapping gives these machines the edge they need to perform reliably.
Delivery Robots
LiDAR has become common in the navigation of street levels where urban deliver robots are commonly used. They map pedestrians, streets, and sides of streets, sidewalks, and curbs, making real time maps as they travel through buildings. LiDAR offers them the accuracy of GPS, which often fails in crowded urban places and environments.
Warehouse Bots
LiDAR mobile robots in industrial settings can assist in relocating items and keeping track of stock as well as address a dynamic floor plan. Based on real-time mapping, these bots are able to plan the most optimum routes and evade human laborers or equipment in real-time.
Outdoor Rovers
LiDAR is used to create terrain maps by robots deployed in big outdoors environments, such as farms, forests or building sites. These assist the robot so that it does not go on unstable ground and can cope with change of elevation and also can follow growth of vegetation or changes in building over time.
Security and Inspection Units
Certain mobile robots are used in night patrol or inspection of a facility. They are able to scan what is around them in the dark and they also manage to navigate despite poor lighting through the aid of LiDAR. They will be able to spot whether the doors are left open, objects are missing, and there are strange movements.
Choosing the Right LiDAR Sensor for Your Robot
LiDAR sensors are not identical. The one you should use will depend on your budget, your environment and what you intend to achieve in the project. These are the factors to observe before purchasing.
Range and Accuracy
In the case of the indoor robots, 4-8 meters are typically sufficient to have a range. To do indoor mapping or to do a mapping in large spaces, you will need a sensor with good reliability at 12 metres and more. The accuracy is generally with few millimeters but the finer accuracy may be costly.
2D vs. 3D Scanning
This is sufficient for mapping walls and avoiding objects at the robot’s level. If you’re building a drone or need to scan vertical structures (like furniture or stairs), 3D LiDAR may be necessary — though it’s more expensive and requires more processing power.
Rotation Speed and Data Rate
Quicker LiDAR devices can scan at higher rates, providing less jittery and even higher detail readings. Simple SLAM or obstacle avoidance can be done with a refresh rate of 5 to 10 Hz. To dynamic environment, go up.
Integration and Compatibility
Ensure that you have LiDAR sensor suitable to your hardware. To illustrate, most entry-level LiDARs such as the RPLiDAR A1 or A2 are easily accessible via either Arduino, Raspberry Pi or ROS (Robot Operating System) systems. These systems include open-source drivers and sample items, so it is much simpler to configure.
Example Setup: Mapping with LiDAR on a Mobile Robot
The following is an easy example to appreciate the assembly of a basic LiDAR-based mapping system. Such an arrangement will suit hobbyists or students or developers who use low-cost robot kits.
Hardware Components
-
A 2D LiDAR sensor (e.g. RPLiDAR A1)
-
Differential drive base-mobile robot
-
Microcontroller (ex. Raspberry Pi or Jetson Nano)
-
Battery or power distribution board
-
Wi-Fi module (optional for remote viewing)
Software Stack
-
ROS (Robot Operating System) installed on your microcontroller
-
SLAM algorithm (GMapping or Cartographer)
-
RViz for map visualization
-
Lidar drivers specific to your sensor
Quicker LiDAR devices can scan at higher rates, providing less jittery and even higher detail readings. Simple SLAM or obstacle avoidance can be done with a refresh rate of 5 to 10 Hz. To dynamic environment, go up.
Common Challenges When Using LiDAR for Mapping
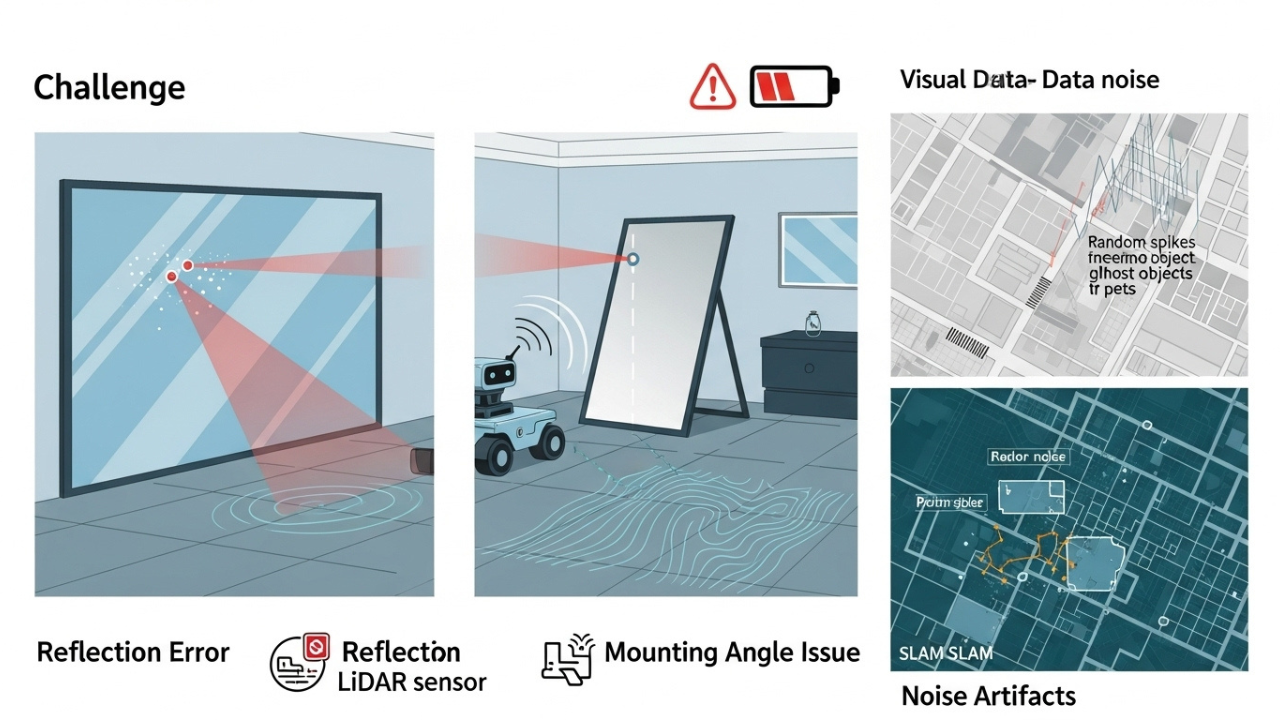
LiDAR is not magic, however, powerful data is provided. There are a number of real life things that can render mapping less precise or difficult. The following are the most widely appeared difficulties and ways to handle them.
1. Reflective and Transparent Surfaces
Mirrors, polished floors and glass sections frequently pose a problem in LiDAR sensors. The laser can either be passed through or be scatter-shotting giving inaccurate reading or holes in the map.
Solution: Do not put LiDAR close to glass walls or mirrors. It is also possible to filter or smooth down the data to eliminate outlier points due to reflection.
2. Sensor Mounting and Angle
Improper mounting can skew your map. When your LiDAR is just slightly off take, distance measurements become stupidly false – particularly when in a real life situation with differing floor levels or there is even some slope involved.
Solution: a level: mount your LiDAR at the same height. Mount a plain bracket or frame, to support the sensor, in an upright position, as desired.
3. Battery Drain and Power Instability
Rotating LiDARs consume more power as compared to the fixed sensors. In case the power supply of your robot is not stable, the sensor can fail to work or can output partial information.
4. Data Noise and Filtering
The real worlds are full of noise. LiDAR is most likely to be affected by random spikes produced by pets, people, dust, or by even moving light sources. Mapping algorithms can be confused by them or it can make the robot think there is something in its path when there is not.
Solution: Most SLAM tools allow you to adjust noise filtering settings or minimum range thresholds. You can also apply moving average filters or segment the map based on stability.
LiDAR vs. Other Mapping Tools: When to Use What
LiDAR is awesome, yet it is not the only one. You might wish to put your project into perspective in comparison to other technologies or combine it with them, depending on the project of yours. A plain comparison is as follows:
| Technology | Pros | Cons |
|---|---|---|
| LiDAR | High precision, works in dark/light | Struggles with glass, expensive for 3D |
| Camera (Visual SLAM) | Rich visual data, inexpensive | Needs lighting, affected by shadows |
| Ultrasonic sensors | Cheap, good for close objects | Narrow field of view, poor resolution |
| Infrared sensors | Good for obstacle detection in short range | Affected by sunlight or heat sources |
Most sophisticated systems include LiDAR that is coupled with camera, IMU (inertial sensor), and encoder data to enhance the performance of mapping operations. This is referred to as sensor fusion and it provides a robot with a variety of sources of information with which to cross-check their spatial knowledge.
What’s Next: Trends in LiDAR and Robot Mapping
Smaller, Less expensive, more powerful LiDAR sensors are enabling mobile robots to go places before, and the applications are too numerous to list. The following are some of the new trends:
1. Solid-State LiDAR
Solid-state LiDAR does not move unlike rotating sensors. This will make it sturdier, less energy-intensive, and more capable of integration in small gadgets such as a drone or a delivery bot. The prices are falling and the new models are attacking on consumer markets. Fleets of robots can now share LiDAR-based maps in real time, allowing them to cover large areas more efficiently.
2. LiDAR with AI Integration
The rise of machine learning allows robots to interpret LiDAR data, not just collect it. Systems can now detect object types, predict motion, and adapt their path — all based on what they “see” in the LiDAR scans.
3. Swarm Mapping with Shared LiDAR
How to efficiently cover a large area with a fleet of robots Robots can now real-time share LiDAR-based maps. This is useful in security, search and rescue, and collaborative delivery systems.
4. Edge Processing and Cloud Mapping
New robots have edge processors and can process LiDAR data locally, which helps to improve autonomy since no processing is done on the central server overhead, decreasing latency. Meanwhile, maps can be synced to the cloud to be monitored remotely, managed or updated.
My Opinion
LiDAR is not just a cool sensor; more of it is a way of providing the mobile robots with sight and light recognition and consciousness. You have a robot delivering coffee, cleaning a warehouse or patrolling a perimeter. LiDAR enables your robot to know what is going on in the real world around it.
And the best thing? There is no need to have a six-figure budget or your own research lab to get to know about LiDAR mapping. Would-be roboticists can now experiment quickly and easily with how robots construct and exploit maps in order to navigate safely within the world, given cheap hardware and open-source tools.
